written by sarah feng
Song of Ourselves
how swarm robotics reflects the power of collective perception in human storytelling

On beige laboratory tables, hundreds of intricate metallic kilobots cluster together, forming new shapes autonomously. Harvard’s Wyss Institute is working to create a fleet of swarm robots, which operate together to carry out goal-directed behaviors. They do this even without the direction of a centralized executive intelligence. The same size as a thumb, these machines utilize local rules that give way to organic swarm behavior. The technology for this was inspired by the natural swarm behaviors of small animals such as birds, bees, and fish.
Modeled off of biological swarms, these swarm robots reflect the structure of living societies, both animal and human. Each robot has the ability to hold data in its memory, both programmed and experiential – similar to individuals in groups. They mimic how smaller units in communities – families in cities, and individuals in families – abide by self-imposed regulations to help the larger mass achieve a goal larger than its own capacity.
When I think of swarm robots, I’m compelled to imagine the scale that one can build out of many, many smaller kilobots. First I envision a sculpture built out of kilobots that fills up an art museum’s gallery space. As the viewer passes through, the kilobot changes shape before their eyes. The motion is somehow a part of the experience. But then I think – can one room even hold the kilobots? I visualize them pouring out of the window, trickling onto the grass that covers the lawn of the museum, encircling the fountain that visitors must bypass in order to reach the doors to the institution. Maybe the kilobots flood across the street, halting traffic – but the families in their cars don’t mind; it’s a routine stoppage near an art museum known to hold these mechanical creatures – organize themselves into four walls and a ceiling, leaving square gaps in the walls as windows of light. Perhaps a nomadic family sees this towering structure and thinks they’ve found a signal from a higher power that it is time to plant their roots down momentarily; perhaps they form something of a home within these walls, dragging in mattresses, some lamps, a gas stove.
I can’t quite think of the limits of physical scale that kilobots cannot achieve: by adding more mass incrementally, we can create larger and larger iterations of this moving mass. Somehow, one image makes its way into my imagination: a tree-like structure formed of kilobots standing motionlessly in the rainforest, its “branches” touching the leafy fronds of its neighbors, which are living trees. I wonder if an alien scientist visiting Earth for the first time would consider this mass a plant or an animal. After all, this swarm of kilobots could disentangle themselves from their cohesive shape and form a few, smaller moving agents, moving through the undergrowth in search of something – not prey, or, at least, not the kind of prey that other predators in the rainforest are searching for. They are fed by batteries, by electrical currents. At what point does the world lack a sufficient amount of energy to power a swarm robot that continues to grow, inch by inch?
Modeling Biological Processes
I would like to see a group of swarm robots juxtaposed against the animals they were modeled after. Around 2005, researchers first attempted to create swarm robots in order to duplicate the ecological self-organization of ecosystems in the natural world, to generate evidence for these patterns. Somewhere along the lines, they realized that these robots posed another possibility – of not only mimicking the processes that animals undertook, but creating their own, perhaps even serving mankind [1]. Some of the original inspirations: clusters of ants forming bridges with their bodies to ferry individual ants across streams of water. Bees making dance-like movements to tell other members of their hive about the quality and location of a food source. Perhaps most classically, birds migrating in a flock – alternating positions at the apex of the ‘V’ in order to reduce one bird’s burden of taking on the wind turbulence [2]. It’s hard to envision small machines with this kind of in-built altruism for other members of their communities, but it can be driven by code.
What I think haunts me the most about my visions of kilobots bursting past the doors of an art museum and forming their own architectures is that there isn’t necessarily a ‘queen kilobot’ that distributes specific tasks to the rest. Rather, they move as a mass, speaking locally to one another about decisions that benefit the overarching goal of the swarm. In swarm algorithms, we are aiming for code with no centralized intelligence. In nature, individual animals only obey a set of local rules; the behavior of the swarm arises perfectly organically from these interactions. However, in human-generated models at the current moment, there is still reliance upon centralized communication infrastructures. But research is currently working towards giving these bots enough infrastructure to make autonomous decisions: these potential solutions range from a ‘reactive mapping’ between their sensory inputs, taking in information from the environment or adjacent bots, and actuator (the component of a machine responsible for physically moving it) outputs, to more intricate algorithms [3].
Swarm robots are more than mere instruments that humans can wield. They receive sensory data and process it, which triggers the reaction of the actuators. This is the same way that we react and act upon the world around us [4]. So perhaps my initial vision was lacking that sense of reaction. I wonder if a child in a house whose walls are made of kilobots would learn to interact with the surfaces around her – if the machines learn to sense when a child is near, to form steps to help her move from one surface to another which is more elevated. But looking at my own considerations, these are still human-centric, envisioning a notably dystopian symbiosis between human and machine ultimately intended to benefit a more effective human existence.
Foundational Swarm Behaviors
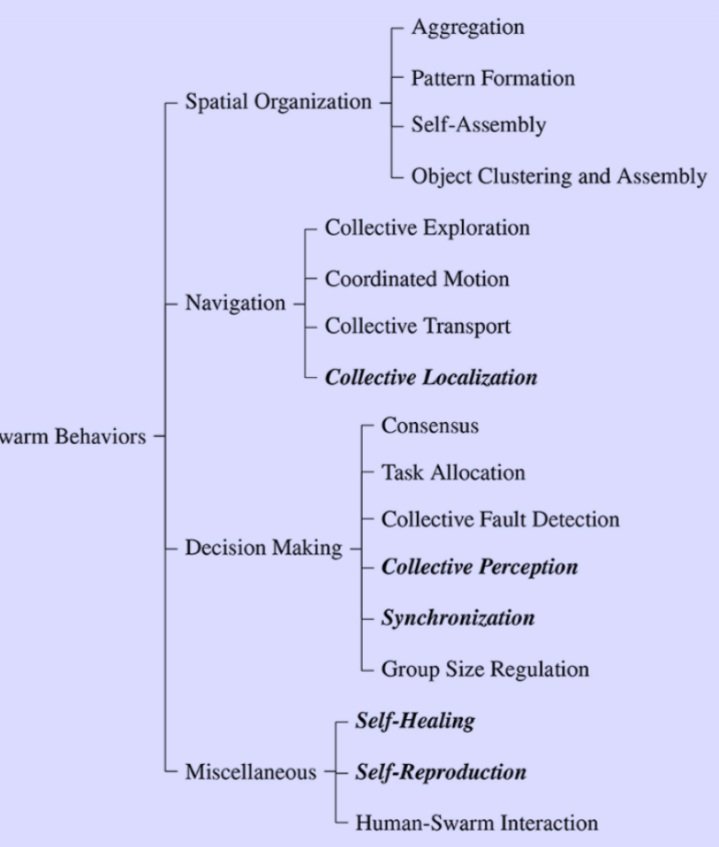
As research moved from programming swarm robots to more accurately mimic animal organization existing in the natural environment today, to enabling flexible behavior capable of adapting to new situations, man-made or natural, machine learning grew to become a critical component of the programs that ran the swarm robots. Engineers brought forth a taxonomy to outline the most important behaviors of a swarm [5].
I think of a nascent cluster of kilobots being released into the world. First, they use their spatial organization behaviors to form themselves in the shape most fit for the environment. Perhaps they create rings, or perhaps they cling to surfaces with random distribution like mussels on a tidepool, seeking out the touch of water. They are capable of manipulating and forming their own body.
Next, for navigation purposes, they must understand their environment and seek out a pathway to follow. They might first collect data on this new terrain, recognizing how to move around its surface, and learn how to engage with this external world in a productive way. Perhaps, in a zero-gravity environment on another planet, they form a snake-like shape to ‘slither’ through the air instead of floating aimlessly. Perhaps in a craggy mountain full of crevices, earlier kilobots in the sequence form flat bridges for later ones to move on top of.
The next part I find the most fascinating: the decision-making process. Together, in this new environment, the swarm must find a way to “maximize the performance of the entire system” [6]. To do this effectively, these bots must not only react and act upon the present moment, but conceive of how their actions span into the future: what steps will be required to bring their goal to reality? How will they execute this? Time, then, is a concept that must be programmed into these kilobots.
Finally, the miscellaneous skills are akin to a toolkit of a protagonist in a game: depending on the conflicts that arise in a specific situation, the kilobots are equipped with a bag of tools to help them. What, precisely, does it mean for a swarm to heal itself, to reproduce? I don’t know, but I sure would like to find out.
Deciding Upon The Optimal Solution
As each bot moves through the world, they are keenly aware of the locations and actions of their siblings. They identify the alignments between their local visual fields by searching for overlaps of landmark configurations. As the number of robots increases, this increases the redundancy of information about position; this redundancy decreases errors [7].
These robots can also tap into a ‘shared consciousness’ – a map of the world in three dimensions built from the individual visions of each kilobot, fused together. Each ‘tiles’ sensory input into one global picture that all can access. They can see each other, but also the world in greater detail and from more perspectives. This collective perception allows robots to “classify objects reliably, allocate an appropriate fraction of robots to a specific task, or determine the optimal solution to a global problem” [8]. The abundance of independently-controlled perspectives increases the number of data points in a trial-and-error model for determining the optimal solution to a problem, making it more possible for a neural network to escape a local minimum before reaching its greatest potential. These parallel sensory inputs create an aggregate mass of complex data that can be accessed by each individual at the small scale.
The map-building process of microbots in a robotic swarm contributes to a robust store of information that can be accessed and modified in real-time by other members of the swarm. It is this potential for data storage and retrieval that truly makes me reconsider how scale can never truly be limited to one distinct physical body. It is a little bit like how humans, I think, trade stories––and how those stories became oral traditions passed from the elderly to the young, that float in the air as a shared bank that we build our lives off of, a harmony.
While, from an external perspective, swarm robots appear to be a sanitized, mindless mass of metal, they contain a rich and dynamic store of data about the world that they are consistently evaluating in order to make their subsequent decision. It is this process that makes me consider how small groups of humans do something similar, piecing together information in order to build a shared map of their immediate surroundings. This map, I think, is more than physical, more than sensory – it’s something more than that, something indefinable, something indescribable. It’s like how individual notes build into a melody, and how a melody and its harmonies blend together to create a song. When it comes to communities, at the smallest scale to the largest scale, the making of music comes from this process of sharing what we see, what we feel, what we believe, to form a collective perception about where we are, and who we are.
Collective Perception, Collective Memory
Considering swarm robots has moved me to consider how it is we perform this collection of data, and how we consider the group’s wellbeing in making our individual decisions. I think of how the stories shared between us, revised, time and time again, by voices young and old, solidify and calcify into memories, which settle like stones at the bottom of a river, where the water of time runs past and slowly, slowly erodes them until they crumble into sand.
The stories we tell ourselves, and then, one another, become a form of collective memory. I think of Toni Morrison’s concept of ‘rememory’ in Beloved, where the narrator’s ghosts come back to haunt her and her daughter in physical form: memory is external from the individual’s body, moving from generation to generation.
“When [Sethe’s] dreams roamed outside 124, anywhere they wished, she saw them sometimes in beautiful trees, their little legs barely visible in the leaves,” writes Toni Morrison in Beloved. (The wildness of that word draws me – roam.)
A quote from Beloved that I can’t seem to forget:
"I was talking about time,” noted her protagonist, Sethe, to her daughter, Denver. “It's so hard for me to believe in it. Some things go. Pass on. Some things just stay. I used to think it was my rememory…. Places, places are still there. If a house burns down, it's gone, but the place — the picture of it — stays, and not just in my rememory, but out there, in the world. What I remember is a picture floating around out there outside my head.”
Like swarm robots, we locate one another in the fabric of time and space by a collective agreement. We see each other, track each other’s motions. By being seen, we exist. We perpetuate one another’s memories, holding them close to our hearts. We perceive together, and remember together. I wonder what it would look like to encode a human memory in a computer program. There’s the visual aspect, sure, but the sonic aspect, the gustatory aspect, the auditory aspect. That’s just the physical pieces of what happened in the concrete world. But there’s also so much more than that within the head of the person remembering the memory: associated emotions arising at a subconscious level, lexical associations to linguistic input. And there are memories so rich and impactful on the directions of our lives that it seems impossible to encode the kind of emotional quality they have – someone’s face behind the roaring bonfire, another’s fingers holding the inside of your wrist like it is a bird.
I don’t know if it’s ever possible to externalize these memories in their fullness. These are the ones who keep private, buried within ourselves. But oftentimes they spill through, and they add to the sense we have when we enter a room full of people, understanding the subconscious diagram of relationships that bind people together. Humans are social creatures; we are programmed to record information about these social relationships through collective memory.
Memory requires a synergy between the self and the mirrors to the selves encapsulated by other people. When we decompose the scale of a community narrative, we recognize the individual’s contribution by looking at their story.
Swarm robotics takes inspiration from organic patterns in nature – but they also remind us of the importance of sharing the minute experiences we have in life. There is much in common we have with birds flying in an organized flock in the sky, ants crawling on the ground. We are looking at our brothers, our sisters, around us, wondering, how can I better see what you see? Sometimes, the answer is to close our eyes and let the music wash over us.